RADARSKI sustavi - Integracija
Integracija radarskih senzora raznih korisnika:
- vojska
- policija
- nadzor pomorskog prometa (VTS)
Izvori informacija za proces integracije su prvenstveno RADARSKI sustavi motrenja. Njihov geografski položaj i područja prekrivanja u određenim situacijama omogućuju pojavu istovremene detekcije istog objekta od strane više senzora. Da bi se osigurala upotrebljivost informacija dobivenih u takvim situacijama, nužno je predvidjeti postupak fuzije podataka. Nakon procesa fuzije, praćeni ciljevi su označeni jedinstvenim (na razini sustava) alfanumeričkim oznakama koje sadrže i identifikaciju cilja te identifikaciju izvora informacija (radarskog senzora).
Podaci o praćenim ciljevima lokalnih senzora pohranjuju se u ulaznu bazu podataka. Sadrže lokalnu identifikacijsku oznaku, poziciju, brzinu, kurs i vrijeme mjerenja. Proces fuzije odvija se u ravnomjernim vremenskim intervalima, ne većim od vremena jednog okreta antene, a budući da su senzori međusobno asinkroni, nakon prikupljanja podataka provodi se njihovo vremensko izjednačavanje.
Nakon vremenskog izjednačavanja, vrši se asocijacija opservacija s već postojećim trajektorijama. Na asocirani par opservacija – trajektorija primjenjuje se test kao mjera povezanosti (asocijacije) para. Rezultat testa određuje da li opservacija pripada dotičnoj trajektoriji ili ne. Opservacije za koje je utvrđena pripadnost istoj trajektoriji se grupiraju i zajedno obnavljaju navedenu trajektoriju. Ukoliko određena opservacija ne pripada niti jednoj od već postojećih trajektorija, po definiranom kriteriju formira se nova. Nasuprot tome, ukoliko određena trajektorija nije imala niti jednu opservaciju kroz određeni vremenski period, briše se. Podaci obnovljenih trajektorija pohranjuju se u bazu podataka gdje su dostupni korisniku.
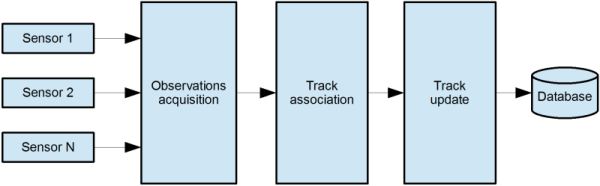
Proces fuzije u integraciji radarskih senzora.